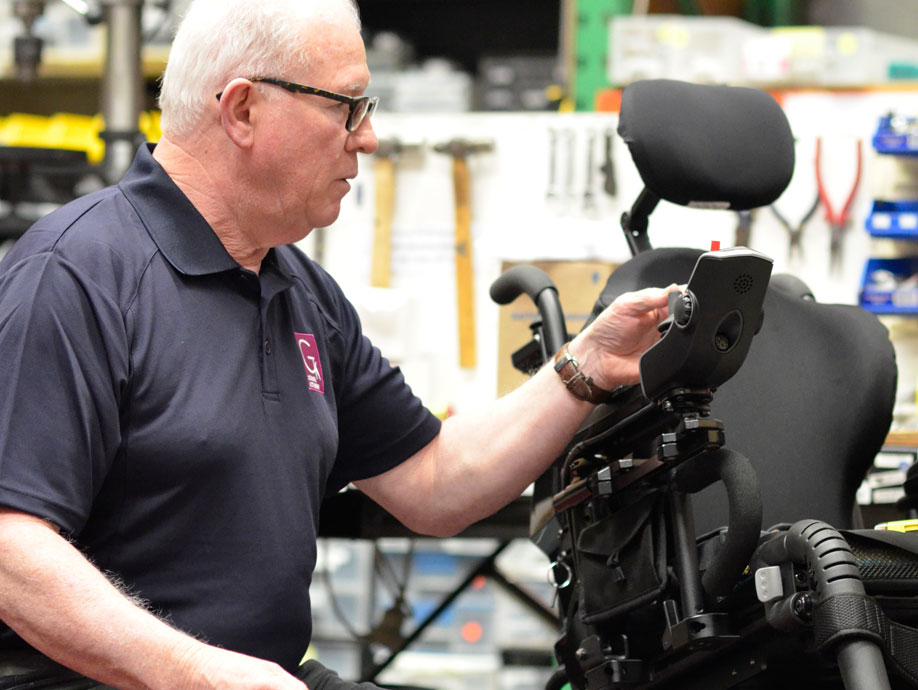
Programming your power wheelchair for optimal driving can make all the difference in improving independence and safety.
For example, a chair that is too sensitive can offset a primitive reflex in a child with cerebral palsy. A chair that stops suddenly may not be ideal for a C3 quad with minimal trunk balance. Our team at GTK is proficient in programming the wheelchairs to perform smoothly, however we are reliant on your clinical and observational skills to match the electronics to the client’s needs.
Each manufacturer has its own electronics system. However, most of them have similar parameters that are programmable. Some of these driving parameters include:
Forward Speed: The maximum speed achieved when the joystick reaches full throw (furthest from centre). It is often represented as a percentage of full available speed on a specific power wheelchair.
Turning Speed: This is full speed achieved during a turn. This is usually set much lower than Forward Speed. If turning speed is too high, the chair may be over responsive and jerky. If the turning speed is too low, the chair will be sluggish. A client with less controlled movements would generally have their turning speed set low.
Reverse Speed: The maximum speed achieved going backwards. It is usually lower than Forward, as drivers generally have less control driving backwards and may reverse farther than necessary if the speed is too high.
Acceleration: How quickly the chair reaches full speed, whether moving forward or reverse or turning. If set too high, the power wheelchair may lurch suddenly. If set too low, the chair may not be responsive enough. Setting this parameter correctly will allow the operator to accommodate to the motion, whatever the direction.
Deceleration: How quickly the chair stops in the parameters listed above. If set too high, the chair may come to an abrupt stop. If set too low, the chair may roll too far forward.
Torque: The power output needed to drive over various surfaces without increasing speed. Setting the torque correctly will allow for controlled driving especially when driving over thresholds, grass or ramps.
In addition to the above parameters, most expandable electronic systems will allow for additional adjustment including: Tremor dampening (how quickly the chair responds to movement of the joystick), joystick throw (how much movement can be applied to the joystick before the chair reaches maximum speed) and directional selection (selecting which joystick movement will move the wheelchair in the selected direction – eg: pulling back on the joystick to go forward.
In summary, programming the wheelchair can make all the difference. There are times where the wheelchair may not need replacing but reprogramming. It is important to select the electronic system that will best match your clients’ immediate and long term powered mobility goals.
GTK is a supplier of the Pride, Permobil, Invacare, Ottobock, and Magic Mobility range of powered wheelchairs. Each manufacturer offers its own electronic package. For example, Invacare use MK6, Ottobock use Curtis, Quantum use Q logic and Magic Mobility use Dynamics. Each system will offer tailored programming on the scripted range of wheelchairs. Your GTK consultant will be able to assist you in finding the right solution.

{kind=link}